


Tra le molteplici declinazioni della robotica c’è anche il medicale, che a sua volta si sviluppa su più fronti, dalla chirurgia robotica ai sistemi di supporto. Proprio in questo ultimo ambito si stanno ottenendo importanti risultati soprattutto per aiutare la deambulazione di chi, per malattia o incidente, non è più autonomo. Per i non vedenti, per esempio, è stata ideata una soluzione che a prima vista può sembrare bizzarra ma che potrà risolvere molti casi pratici. Si sta parlando di un cane-guida robot, che nasce dal connubio tra la robotica mobile bio-inspired e una sensoristica già ampiamente collaudata in ambito industriale. I cani-guida “reali” non sono certo solo un mero strumento, anche perché si crea un’interazione affettiva con l’uomo. Non tutti i cani però possono svolgere il delicato compito di guida per non vedenti e serve un addestramento lungo e costoso.
Interazione uomo-robot tramite un guinzaglio high-tech
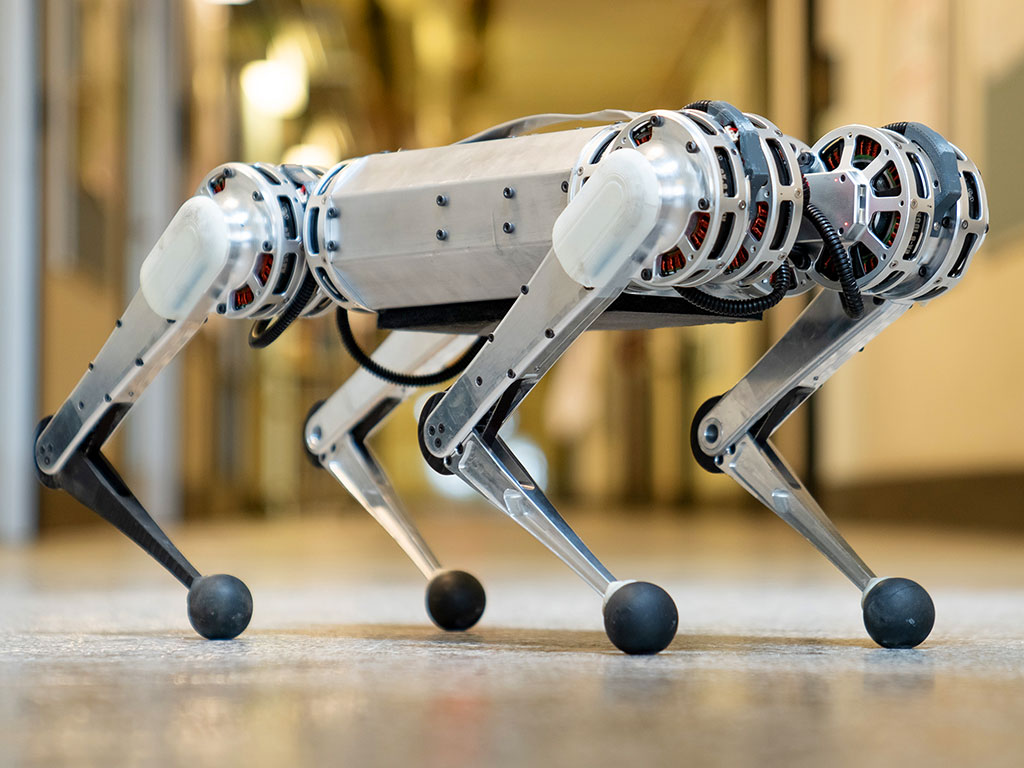
I ricercatori del gruppo Hybrid Robotics dell’Università della California, a Berkeley, hanno quindi pensato a un’alternativa robotica, realizzando un nuovo modello di interazione uomo-robot partendo da un robot già disponibile. Come base per lo sviluppo del cane-guida robot è stato utilizzato il robot Mini Cheetah (piccolo ghepardo), robusto e agile robot a quattro zampe, concepito dal laboratorio di robotica biomimetica del MIT per testare nuovi attuatori e controller. L’interazione uomo-robot avviene tramite un guinzaglio high-tech flessibile, che può essere tirato o allentato per una maggiore scioltezza e sincronizzazione nei movimenti. Inoltre è equipaggiato con un sensore che misura la forza applicata dall’uomo.
Orientamento nello spazio tramite Lidar
Mini Cheetah si orienta nello spazio tramite Lidar, Laser Imaging Detection and Ranging. Si tratta di una tecnica di telerilevamento che permette di determinare la distanza di un oggetto con un impulso laser. Con una videocamera posizionata sul dorso, il robot è in grado di tracciare costantemente la posizione dell’essere umano che lo segue, adattando così l’andatura. A questo si aggiunge una serie di sensori ottici per il controllo del percorso, con acquisizione degli ostacoli da evitare, e un GPS per la navigazione da un punto di partenza a quello di arrivo.


{kind=link}