

Gli AMR (Autonomous Mobile Robot) sfruttano laser scanner e telecamere 3D per riconoscere gli ostacoli e modificare di conseguenza il proprio percorso. Sono maggiormente flessibili ed economici rispetto ai più tradizionali AGV (Automated Guided Vehicles) e si adattano facilmente alle variazioni della linea di produzione, rappresentando così un ulteriore vantaggio competitivo nel percorso di automazione del trasporto interno, in particolare per le aziende del manifatturiero. Essenziale dal punto di vista tecnologico è, in ogni caso, il riconoscimento degli oggetti, siano essi ostacoli o pallet da prelevare, mentre come prioritari sono gli aspetti di sicurezza, per le persone e per le cose.
Proprio di AMR, vision e safety abbiamo avuto l’opportunità di parlare con l’ingegner Mirko Dibenedetto, Head of ID & Vision Solution Integration Unit di SICK, azienda affermata a livello internazionale nelle soluzioni basate su sensori per applicazioni industriali.
La logistica industriale è un settore in forte fermento tecnologico: qual è il contributo specifico di SICK a questo comparto?
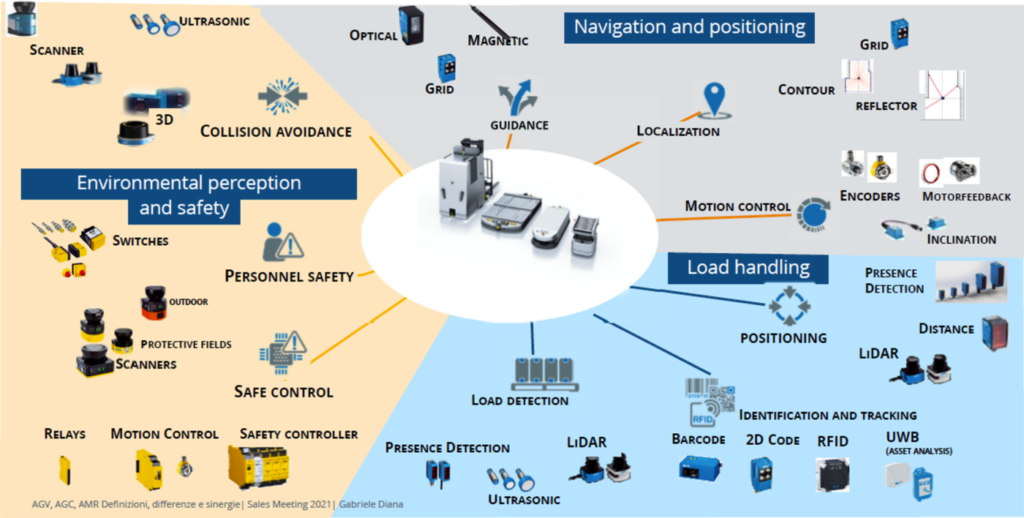
Le soluzioni SICK in ambito logistico sono da sempre all’avanguardia dal punto di vista tecnologico. In particolare, se ci focalizziamo sul mercato dei veicoli a guida autonoma, siamo in grado di proporre tre tipologie di soluzioni:
- Navigation & Positioning, con ad esempio strumenti di motion control
- Environment Perception & Safety, con strumenti per analizzare l’ambiente circostante ed evitare collisioni
- Load Handling, ambito in cui troviamo, ad esempio, sistemi di controllo presenza per manovrare i carichi.
Considerando in particolare gli AMR, quale ritiene possa essere l’aspetto tecnologico più importante?
Le soluzioni di visione sono ormai diventate un aspetto cruciale quando si parla di AMR. L’obiettivo finale è infatti quello di rendere disponibili veicoli intelligenti, autonomi e in grado di adattarsi ai cambiamenti esterni. Da tempo, fra le nostre soluzioni di Environment Perception & Safety proponiamo laser scanner 2D per garantire la sicurezza di persone e cose. Ma la vera novità è che nel maggio scorso abbiamo lanciato la soluzione 3D LiDAR sensor multiScan100, che permette ben 16 livelli di scansione in 3D. La panoramica a 360°, ad alta risoluzione, permette di localizzare oggetti utilizzando una nuvola di punti 3D opportunamente dimensionata. Inoltre, il sistema è in grado di filtrare neve, pioggia o particelle utilizzando la tecnologia Multi-Echo.
Le tecnologie di visione entrano in gioco anche in altri prodotti afferenti all’Environment Perception & Safety?
Certamente. Anche le soluzioni per il prelievo di pallet Dolly Positioning e Pallet Pocket Detection sono basate su camera Visionary 3D a tempo di volo, per permettere una determinazione esatta della posizione e dell’orientamento del pallet da prelevare.
Nel Dolly Positioning, l'app del sensore di posizionamento dolly di SICK consente una determinazione affidabile del luogo e della posizione del dolly. Il sistema presenta un’interfaccia utente assolutamente intuitiva ed è realizzato in modo tale da richiedere bassissima manutenzione. Il Pallet Pocket Detection risolve in particolare il problema del prelievo di pallet nel caso di magazzini a scaffalatura alta, quindi con scarsa visibilità. La combinazione di sensori e di impiego di algoritmi di machine learning garantisce in questo caso la massima precisione, ancora una volta attraverso un’interfaccia molto intuitiva.
Passiamo ora alle soluzioni SICK in ambito Navigation & Positioning: qual è la vostra proposta?
Una delle soluzioni più importanti di SICK in ambito Navigation and Positioning per AMR è sicuramente costituita dalla famiglia GLS. I prodotti GLS6, in particolare, sono stati realizzati specificamente per la localizzazione mediante griglie di codice 2D nella logistica di magazzino. Grazie alla forma costruttiva sottile, è possibile utilizzare questa soluzione per la localizzazione per AMR di qualsiasi dimensione. Con l’ausilio dell’etichetta multi-codice, GLS6 rileva infatti con accuratezza la posizione di un AMR in uno spazio, senza che questo debba ridurre la propria velocità di marcia (fino a 5 m/s).
Inoltre, grazie alla forma costruttiva compatta, con unità connettore girevole o passacavi flessibile, GLS6 può essere montato anche dove lo spazio è poco e venire allineato rapidamente tramite il sensore angolare integrato.

Ci restano da esplorare le soluzioni in ambito Load Handling: anche in questo caso SICK ha sviluppato innovazioni tecnologiche specifiche?
In ambito Load Handling possiamo senz’altro affermare che il controllo qualità dei pallet sta diventando un’applicazione molto richiesta. Anche in questo caso, SICK mette in gioco la propria esperienza proponendo le soluzioni PACS (Pallet Classification System) e Pallet Inspection.
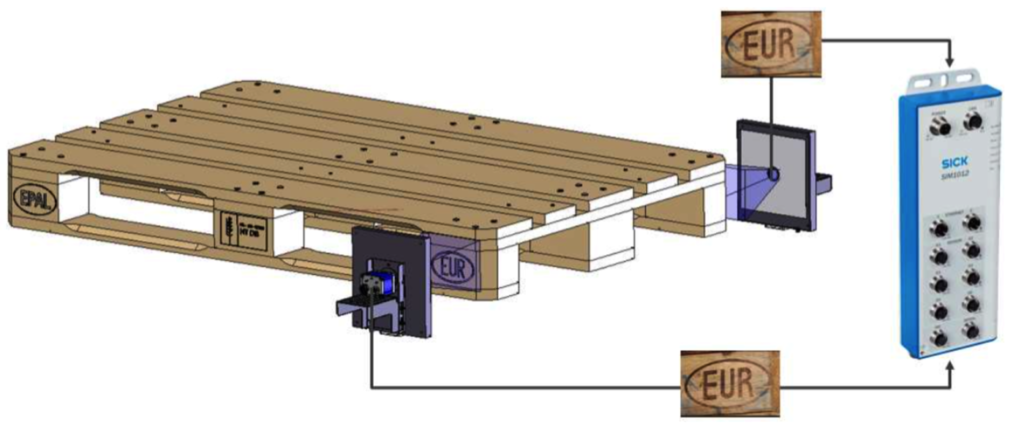
PACS, mediante l’utilizzo di algoritmi di deep learning, è in grado di riconoscere e classificare il pallet basandosi su immagini 2D. Il sistema si compone di una camera 2D PicoCam, associata ad una SIM (Sensor Integration Machine), opportunamente programmata all’interno dell’ambiente di sviluppo proprietario SICK AppSpace, dove avviene l’analisi dell’immagine e la sua classificazione.
Pallet Inspection si basa invece su tecnologia 3D a triangolazione laser per verificare l’integrità e la qualità del Pallet utilizzato prima che esso possa essere ritenuto idoneo per un successivo utilizzo. Il sistema ottimizza i dati proveniente dalla camera Ruler3 e li analizza, anche in questo caso, a bordo di una SIM per individuare eventuali anomalie e difetti.
Sia PACS che Pallet Inspection sono stati fra i principali protagonisti della fiera SPS tenutasi a Parma lo scorso maggio.


{kind=link}